

江苏省港口集团科技创新项目斩获新殊荣
近日,由交通运输部科技司、国际合作司及长三角区域合作办公室指导,长三角三省一市交通运输厅(委)、人力资源和社会保障厅(局)等政府机关和行业单位联合主办的第29届智能交通世界大会创新大赛暨第一届“姑苏杯”长三角智能交通创新技术应用大赛落下帷幕,省港口集团、信息公司和集装箱公司联合申报的“基于车机路云协同的集装箱码头无人化研发与应用”项目、南京港股份有限公司的“基于多源数据融合的船舶划江及靠离泊作业可视化调运管理系统”项目从江苏赛区527项作品中脱颖而出,代表江苏赛区25强参与最终评比,荣获大赛优秀奖。
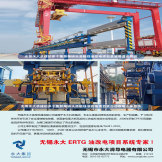
█ 基于车机路云协同的集装箱码头无人化研发与应用

本项目落地太仓港四期码头,是无人集卡、全流程无人化作业在沿江港口的首次应用。项目聚焦内河港运营过程中存在的“两高、两低、两难”(码头工人操作风险高、内河码头作业场景复杂度高,机械使用效率低、堆场空间利用率低,特种人员招聘难、生产要素协同难)痛点,采用先进的云控平台模式,通过“强云端”+“强终端”组合拳,克服了传统港口无人化存在的完全依赖单机智能、易死锁等问题。平台适应复杂内河港场景,可对接各类无人集卡、平板,支持无人有人集卡混行和统一调度,支持轨道吊、轮胎吊、正面吊、空箱堆高机等的作业,助力原本独立、割裂的车辆、机械、道路等生产要素真正具备了全局规划、全局决策的无人化高效协同能力,有着高复用、低耦合的特点,具备广泛的推广应用效益,有利于加速推动内河港集装箱码头进入无人化时代。
█基于多源数据融合的船舶划江及靠离泊作业可视化调运管理系统

本项目利用物理模型、传感器数据、仿真技术等,将真实世界码头的水域、管线、船舶、装卸作业,在虚拟空间中进行复制和映射,从而实现实时监测、分析和交叉比对,同步各对象,组建数字基座。通过布设岸基雷达、AIS、夜视设备、CCTV等感知设备,全方位、全天候探测码头附近区域内的运动目标,识别其身份,建立起三维数字航道。可为调度管理人员、锚泊地管理人员,提供完善的交通监视统计、划江作业调度、安全管理、锚泊地管理。可以实时评估作业码头和锚泊地周边交通流和航行风险,提示预警,并推荐划江策略。同步向手机端、PC端实时推送水域感知结果和调度信息,支撑起跨域管理。
































































更多
地址:上海市宝山区真陈路1085号敉平大厦16层

订阅号

服务号
地址:上海市宝山区真陈路1085号敉平大厦16层
电话:021-60719618
沪ICP备20022239号-2 沪公网安备 31011302006472
Copyright © 2008-2021 上海国腾广告传播有限公司版权所有

扫码手机查看
港口机械设备订阅号
港口设备服务号